拓路眼告诉你:AEB到底应该怎么测
最近有一批广泛传播于各个短视频APP,主题是各个品牌的销售人员花式作死测试自家产品的AEB性能:有女主持充当假人的,有开着车撞纸箱墙的,还有自己开车撞自己的,眼花缭乱之余,我们不禁要问,正经的AEB测试是怎么进行的?
E-NCAP
一句话:请认准E-NCAP标志——European New Car Assessment
Program,欧洲新车评价规程。各国NCAP的诞生一般都具有政府背景,其主要目的是评价新车型的设计面对各种安全威胁时的表现,而今年恰好是E-NCAP诞生20周年。
为什么选E-NCAP而不是其他的诸如NHTSA的试验方法呢?很简单,对于AEB试验,中国的C-NCAP基本就是照抄E-NCAP的。
现行的E-NCAP AEB测试规范是2015年6月发布的1.1版,我们就基于该版本介绍这种得到OEM普遍认可的AEB测试方法。本文主要讨论车对车的AEB测试。
车对车的AEB测试
首先,最重要的是目标车的选择,测试方法对此有明确的规定,就是下图这货,官方名称是EVT,Euro NCAP Vehicle
Target,要求能模拟C类车的雷达特征、反射率和视觉特征,从而使得毫米波雷达、激光雷达、摄像头或者光电传感器能够正常工作。EVT没有动力,在目标车车速不为0的移动测试中,由一辆专用拖车牵引EVT进行试验。
所以,某汽车网站用的那个充气车,以及各种民间媒体的各种纸板目标,亦或无知无畏的人肉障碍,都是耍流氓,被测车辆就算没减速直接撞了也并不能说明什么问题。
AEB系统可以简单地分为两大类:AEB City和AEB Inter-Urban,可以粗暴地理解成AEB City负责低速工况(10~50kph),而AEB
Inter-Urban需要覆盖至中速工况(30~70kph)。
由于市面上多数AEB系统都具有FCW(前撞预警)功能,所以下面的讲述都是基于假设车辆配备的是AEB+FCW功能的系统这一前提。
接下来需要知道的是,在E-NCAP中AEB测试分为三种工况:
CCRs,Car to Car Rear Stationary,理解为对静止车辆的追尾工况;
CCRm,Car to Car Rear Moving,理解为对匀速运动车辆的追尾工况;
CCRb,Car to Car Rear Braking,理解为对原本匀速运动的车辆以一定减速度制动的追尾工况。
下面简单叙述一下这三种工况的具体内容,为了不陷入工程师的世界太深,这里不做技术细节的展开。不过需要注意的是,所有测试都要在严格限制的测试环境下进行,要求晴天、干燥沥青路面等等。
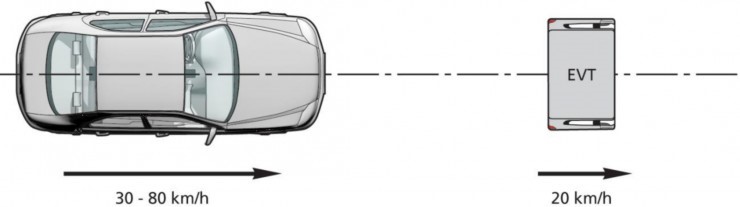
对于AEB City系统,CCRs测试在10~50kph的低速区间进行。而在对AEB
Inter-Urban系统的CCRs测试中,则仅在30~80kph对该系统的FCW功能进行测试。
而CCRm和CCRb测试仅对AEB Inter-Urban系统进行。
其中对于AEB
Inter-Urban系统的AEB功能,CCRm测试速度区间为30~70kph;同时在50~80kph速度区间对其FCW功能进行测试,不过仅选择在AEB测试中未能避免碰撞的速度点进行测试。
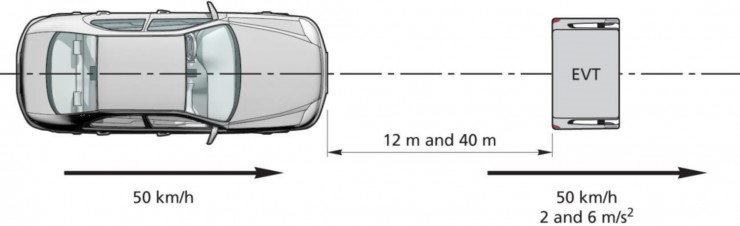
在CCRb测试中,两车车速保持50kph恒定,两车之间的距离保持12m或者40m,待两车车速和车距都稳定以后,前车(EVT)以2m/s2或6m/s2的减速度进行制动。对AEB功能和FCW需要分别进行测试CCRb工况,其中对于FCW功能的测试同样仅在AEB功能未能避免碰撞的速度点和距离组合进行测试。
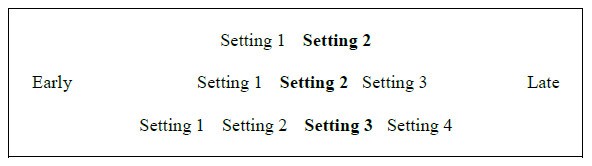
如果被测车辆配备的AEB系统允许用户手动调整报警或者制动时机的话,在试验开始前需要合理地设置AEB触发时机。根据不同系统的触发时机分级设计,具体设置方法如下:
如果该系统包括行人保护功能的话,需要关闭行人保护功能再进行测试。
在整个测试过程中,期望车辆中心线和目标车中心线处于同一条直线上,最大偏移不得超过预设中心线±0.1m。
以上测试中所有的车速和车距数据均由GPS测定。当然这里使用的GPS与手机GPS完全不同,是专门设计制造的,在配合惯性传感器的前提下,能达到非常高的测量精度,例如实际使用中,对车距的测量精度大约能精确至10cm左右。
此外,在FCW测试中,为了模拟用户的实际操作,需要使用制动机器人。在FCW报警发出1.2s后,制动机器人以4 m/s2的目标减速度进行制动。
E-NCAP AEB测试的测试结果是根据车辆的实际表现计算得分,而不是简单的说合格或者不合格,具体计算分值的方法较为复杂。
我认为对于消费者而言更有意义的是了解一般的AEB系统的性能极限——能够刹停的最高车速(这里指晴天、能见度良好,周围环境简单,干燥沥青路面):CCRs工况刹停的极限速度大约为30kph;CCRm工况刹停的极限速度大约为60kph;而在CCRb工况下,一般在前车减速度为2m/s2时均能刹停。但当前车减速度为6m/s2时,很多系统在跟车较近(12m)时,反而表现更好,能够刹停,当跟车距离较远时,由于识别较晚等原因,通常无法刹停。
车珀仕科技信息公司是一家专业从事汽车主动安全技术研发、生产、推广和销售服务的高新科技公司,在环境感知、决策规划等智能驾驶关键领域拥有核心技术,并具备车规级汽车软硬件开发与测试能力。
旗下“拓路眼”品牌基于全球领先的双目立体视觉技术,发展出了针对乘用车、商用车等不同场景的终端应用、致力于为汽车自动驾驶安全提供可靠的感知与决策解决方案。
拓路眼AEB自动刹车系统中的双目立体相机可实时构建出车辆行驶道路前方的三维空间场景,可检测各类障碍物和识别多种车道线,能够在车辆行驶过程中针对潜在碰撞危险向驾驶员发出提醒,
如驾驶员无减速动作时,系统可通过控制原车制动系统或后装刹车部件使车辆减速,有效降低交通事故发生的概率。
系统支持选装毫米波雷达,通过整合立体视觉和毫米波雷达传感器的感知数据,提高系统的探测距离和鲁棒性,确保系统在各类恶劣天气下(雨、雪、
雾)、光照(夜晚、逆光)和道路场景(城市道路、乡村道路、高速)中均能稳定正常工作。
降低交通事故率、保障驾乘人员的行车安全是拓路眼持之以恒的使命。我们立志要做最专业的驾驶安全管理专家。