新闻中心
- 主页
- 新闻中心

AEBS,是“Advanced Emergency Braking
System”英文简称,专业术语名称是“自动紧急制动系统”。所谓自动紧急制动系统,即在驾车过程中仍然以驾驶员为主导,AEBS起到提醒驾驶员、并在危急情况下才进行干预的作用。
Mobileye的技术原理是通过前置摄像头对前方物体进行实时监测,同时配以算法计算出物体与车辆的距离,从而实现车道偏离警告、前车防撞、行人探测与防撞等ADAS功能。对于这个摄像头,Mobileye的产品采用的是单目摄像头。
单目摄像头的特点是对物体的位置和距离感知会产生偏差,这就类似于我们人类的眼睛,分别闭上左眼和右眼,一个物体在我们眼中的位置和距离是有偏差的,而且绝对距离越近这种偏差效应越明显。
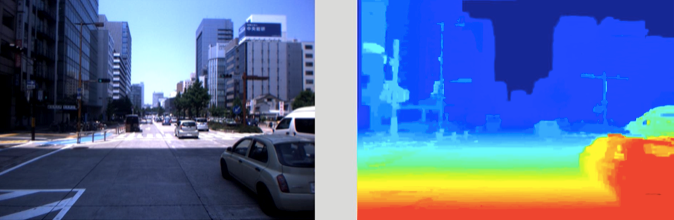
与单目摄像头对应的是双目摄像头,这应用在月球车、机器人、X-Box上,其测距原理类似于3D电影。为了克服单目摄像头的局限,拓路眼采用的是前置双目3D镜头,同时搭载了拓路眼的MPV算法,将相机拍摄到的景物实时转换为距离(在下图中,色调冷暖表示距离大小),从而实现车道偏离警告(LDW)、自动车道保持辅助(LKA)、远光灯/近光灯控制(TSR)、前车防撞预警系统(FCWS)以及行人探测与防撞警示(PCW)等ADAS功能。