浅谈AEB(自动紧急制动)技术发展趋势
随着主动安全技术的不断发展,许多汽车制造商纷纷将AEB(自动紧急制动)功能等作为新车上市的重要卖点之一。AEB由何而来?它的技术发展趋势是怎样的?今天,我们就和大家简单聊聊AEB技术的前世今生。
什么是AEB?
自动紧急制动(Autonomous Emergency
Braking),是基于环境感知传感器(如:毫米波雷达或视觉摄像头)感知前方可能与车辆、行人或其他交通参与者所发生的碰撞风险,并通过系统自动触发执行机构(如:电子稳定程序ESP®)来实施制动,以避免碰撞或减轻碰撞程度的主动安全功能。
与传统的被动安全技术不同,后者旨在碰撞发生后保障车内与车外人员免受或少受碰撞的伤害,AEB则是一种预防性的主动安全技术,旨在事先识别碰撞风险,完全规避碰撞发生或尽最大可能地减轻碰撞的强度,从而避免车辆追尾,或与行人及其他交通参与者发生碰撞事故。
AEB有哪些类型?
广义上,AEB不仅包含紧急制动功能,还包含前向碰撞预警(Front Collision
Warning)以及紧急制动辅助(EmergencyBraking
Assist或者Dynamic Brake
Support)。目前,市场上的AEB功能无论从名称抑或技术实现形式上都分许多类型,我们不妨在此先进行简单的梳理。
按功能名称划分
各大主机厂与零部件一级供应商对AEB的命名各有不同。如博世的预测性紧急制动系统(Predictive
Emergency Braking System)就包含了FCW、EBA以及AEB
3个子功能,分别对应驾驶员注意力不集中、驾驶员制动力不足以及驾驶员无制动反应等3种不同工况。戴姆勒的Attention
Assist、沃尔沃与吉利的City Safety,虽然名称相异,但也包含上述3个子功能。
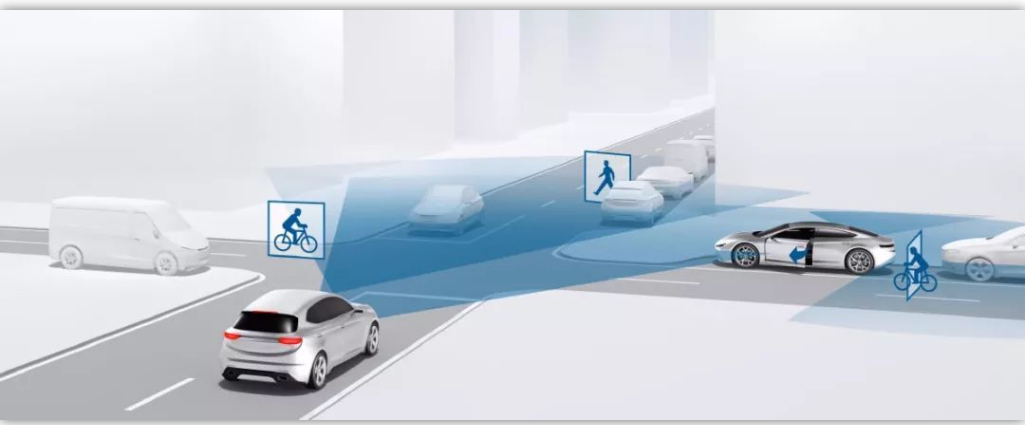
按识别的交通参与者类型划分
目前市面上的AEB功能,除了支持避免追尾工况的AEB车对车之外,还有支持识别行人的AEB-Pedestrian,和支持识别两轮车骑行人的AEB-Cyclist。
按支持的行驶速度段划分
欧洲新车评价规程(Euro
NCAP)在2014年引入的AEB评测中,首次将针对城市内低速工况的AEB-City以及高速城市间道路工况的AEB-Interurban进行了区分,并针对不同工况设置了不同的测试项。
按技术实现形式划分
沃尔沃早期车型上配备的City
Safety主要依靠大陆的激光传感器实现,除此之外,大多数AEB功能的实现形式是以毫米波雷达(以博世、大陆等为主的阵营)、单目视觉摄像头(以Mobileye等为主的阵营)、双目视觉摄像头(以博世、大陆和日立等为主的阵营)以及多传感器数据融合(以博世、大陆、安波福和维宁尔等为主的阵营)来实现的。
AEB由何而来?
在AEB技术首次装配在乘用车上以前,为了消除车辆行驶过程中出现的追尾风险,博世于1999年首个量产的毫米波雷达项目上推出了前车距离提醒功能(Distance
Warning)。该功能可以根据雷达计算与前车的碰撞时间(TTC, Time
to Collision),发现潜在的追尾风险,对驾驶员进行相应的警示,以此防追尾发生。
之后,随着毫米波雷达技术的进步,以及电子稳定程序ESP®的普及,带有制动功能的碰撞预警功能随即出现。而AEB技术的真正普及与快速发展,则要得益于2014年Euro
NCAP首次将AEB-City及AEB-Interurban技术引入2014/15年的评价规程。该评分机制要求,5分评价车型规定必须配备一项驾驶员辅助系统功能,这为AEB在欧洲新车型上的普及奠定了很好的基础。
2015年,面向欧洲市场推出的第七代高尔夫车型上,AEB功能已经作为绝大部分车型的配置出现在消费者手里。跟据英国Thatcham研究机构依据5000多辆高尔夫车型保险事故报告的调研结果*,装配了AEB的高尔夫可有效避免低速下的碰撞事故,与追尾相关的车损事故相比之前减少了约45%。
当AEB技术为车对车追尾事提供了有效防范后,车与行人发生的碰撞事故继而成为Euro
NCAP的又一关注对象。在2016/17年的评价规程中,特别引入了针对弱势道路使用者(Vulnerable Road
Users)的自动紧急制动功能(AEB-VRU)评价。在新引入的AEB行人测试中,特别针对行人横穿道路,以及国内常说的“鬼探头”场景,即儿童行人横穿有遮挡的道路等场景,进行了评价。
为了满足有效应对更多事故场景的要求,Euro
NCAP在2020/22年以及后续的2025年路线图规划中,相继引入针对如十字路口、转弯遇车辆与行人、车辆与行人避让、倒车AEB等更为复杂场景的功能,必将极大推动AEB技术的进步。
回到全球最大的汽车市场,中国新车评价规程(C-NCAP)也在2018版中引入了AEB车对车及AEB车对行人两项评价,并在相应的测试场景、速度及权重上,基于中国道路事故深入研究数据库(CIDAS)中的中国道路上发生的车与车追尾以及车与行人碰撞的事故场景,进行了相应的优化及调整,以更契合中国特殊的道路情况。
为了普及AEB功能的装配率,当测试车型未将AEB作为标准配置时,C-NCAP会对装配率进行考核——装配率必须达到25%才能得到所有AEB测试的分数。而对于全系标配AEB的车型,C-NCAP也给予了系统加乘1.2的鼓励。
值得注意的是,从2019年7月起,依照主动安全模块中的5星级门槛最低得分率要求来看,不配备AEB功能而想拿到5星级,已经非常困难。2016年,博世基于CIDAS中国事故数据的研究结果显示,针对中国道路上发生的车辆与车辆追尾事故,假如配备AEB功能,65%以上的事故都可以被完全避免;针对车与行人发生的事故,假如配备AEB-Pedestrian功能,每4起事故中有1起就可以被完全避免(即便是车辆高速与行人发生碰撞过程中,碰撞伤害也可极大程度的降低,从而避免死亡事故的发生)。
AEB发展趋势?
通过观察与梳理可以发现,AEB技术的发展呈现出如下几大趋势:
一、逐渐成为新车型标准配置,欧洲立法先行。
随着Euro
NCAP在新技术引入上的不断前行,AEB作为主动安全技术中的重中之重,已在欧洲新生产的乘用车上具备较高的装配率。近年来,作为联合国道路安全十年行动的一部分,“Stop
the
Crash”项目也在全球范围内对AEB-City及AEB-Interurban技术进行全面推广,以对消费者进行安全技术的教育普及。
2017年,北美20家汽车制造商自发地组织了“2022年新车标配AEB技术”的倡议。除了已对商用车进行AEB强制立法已外,继ESC(电子稳定控制系统)之后,欧盟近日也正式将于2021—2022年在所有新车型上强制配备AEB。
对于中国而言,AEB技术在自主品牌上的配备也已相当可观。除了像长城WEY这样标配AEB技术的品牌外,其他如吉利、长安、广汽、上汽以及以价格主打市场的宝骏等中国汽车制造商与汽车品牌也在新车型上相继装配AEB技术。AEB技术在中国的发展,势必会带来车辆安全技术不断提升,推动如ESC等相关技术的立法强标进程。
二、实现AEB技术的形式呈多样化、差异化,但融合为主要技术发展趋势。
实现AEB的技术形式是多样化的。随着市场的不断发展以及整车成本的差异化,在满足基本法规及评价规程要求之外,AEB技术的实现形式必然是多样化的,无论是注重成本的经济型车型上的单传感器(如通过单雷达或单目摄像头)实现AEB技术,又或是高端车型上应用诸如双目摄像头实现AEB技术的方案……
未来出于对于AEB性能稳定性以及防止误作用等因素的考量,数据融合方案(多指毫米波雷达与视觉摄像头的数据融合)将会越来越多地成为主机厂实现AEB功能的主要技术形式。
数据融合的好处,在于可以利用各自传感器的优势,如毫米波雷达对于多种天气条的适应性,以及摄像头对于物体识别的优点,大大提高AEB功能在复杂路况下的性能及可靠性,降低误作用风险。而在数据融合中引入毫米波雷达,也可大大提高功能的可用性,特别是当摄像头因天气或环境因素视野受阻、性能降低的情况下,也为行车安全提供双保险。随着未来自动驾驶技术的发展,多传感器融合将会极大的提高AEB功能在场景应用上的扩展以及可靠性。
三、主动安全技术发展促进传统被动安全技术与之融合。
主动安全技术的出现,是在事故发生前对潜在的风险进行预防,以避免事故发生,但并不意味着不再需要传统的被动安全技术。主被动安全融合技术的出现,正是在传统被动安全的基础之上,对主动安全加以利用,从而更好的实现对于事故的避免。如采埃孚公司的OSS乘员安全系统以及博世的ISS智能安全系统,都是在传统的碰撞安全技术中,引入了主动安全传感器的信号,如针对卡车追尾安全气囊点爆率,气囊点爆时间优化,以及针对有AEB的车辆在碰撞中对乘员姿态的优化等应用场景。这些都是主被动安全技术不断融合的产物。
最后,随着近年来自动驾驶技术的不断发展,有些观点认为未来车辆将不需要安全技术。笔者认为,无论是被动安全,还是主动安全,安全永远是汽车产业的生存之本。当完全自动驾驶技术到来之时,安全技术仍是最重要的那根“稻草”。以安全为本的技术开发,才是中国汽车产业实现智能网联弯道超车的不二法门。






